共局在#
共局在とは#
共局在 colocalization とは、2種類以上の異なる標識(例:eGFP や mCherry)が画像上で空間的に重なって観察される現象を指します(共起 co-occurrence とも呼ばれます)。共局在のもう一つの重要な側面は、蛍光強度の相関です(例えば、eGFP の輝度が高い画素では mCherry の輝度も高い、といった強度の対応関係が見られるなど)。共局在の評価は、必ず定量的に行うことが重要です。絶対に自分の目を信じてはいけません!
また、共局在は必ずしも相互作用を意味するわけではないことにも注意が必要です。
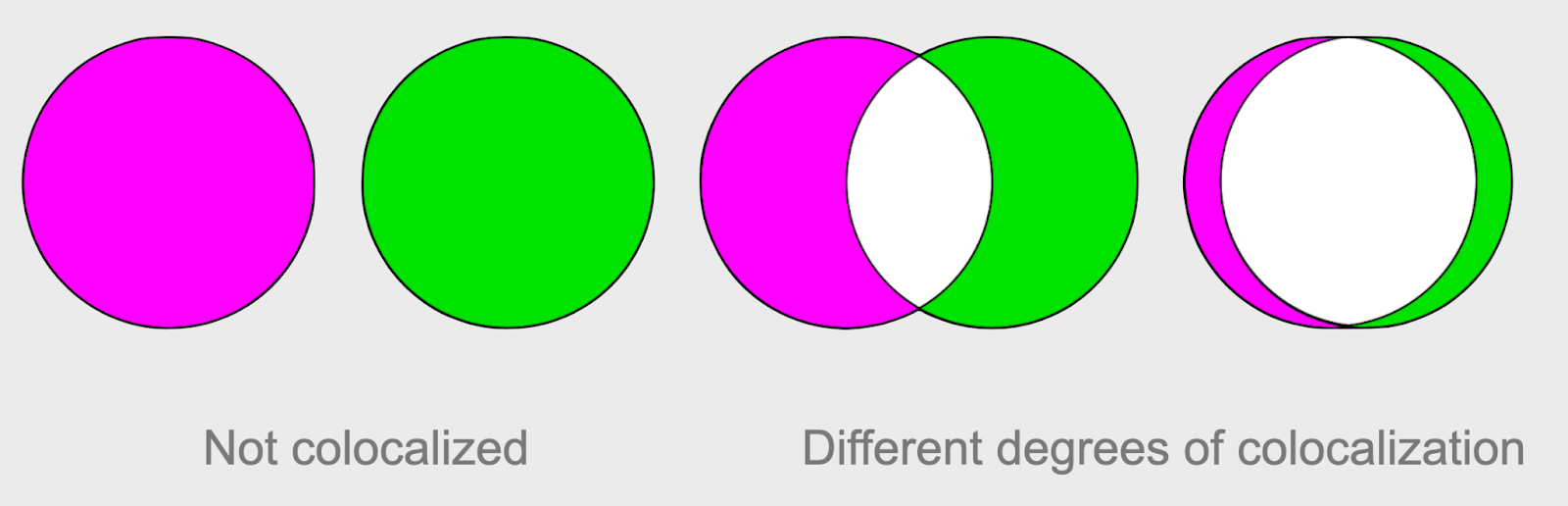
図 6 共局在はラベルの強度と空間的な重なりです#
📏 測定方法
共局在を見る方法には、大きく分けてオブジェクトベースと相関ベースの2種類の方法があります。
オブジェクトベースの共局在は、複数の標識に対して陽性であるオブジェクトの割合について述べたい場合に適しています(例:eGFP 陽性細胞の 99% が mCherry に対しても陽性であった)。以下に、サンプルのワークフローを示します。
相関ベースの共局在は、測定対象の標識が明確なオブジェクトとして存在しない場合や、標識間のシグナルが相関すると予測される場合により適しています。相関ベースの共局在は、オブジェクトの セグメンテーション segmentation を必要としないため、比較的容易に測定できます。ピアソンの相関係数は、多くの画像解析ソフトウェア(例:FIJI、CellProfiler など)で容易に算出することができます。
⚠️ 問題が生じやすいポイント
適切なコントロールがない(例:1種類の蛍光標識のみを含む単一標識コントロール)。ノイズ、不均一な照明、その他の技術的アーティファクトは、2つのチャンネル間に見かけ上の相関を生じさせることがあります。
チャンネル間のずれを補正していない 一般的に、光学系の違い(例:異なるフィルターキューブ)により、異なる撮像チャンネル間にある程度の位置ずれが生じます。(ずれを測定し、それに対応する補正を各チャンネルに適用するなどの方法で)このずれを補正しない場合、共局在を正確に検出する能力が制限される可能性があります。
ブリードスルー ある蛍光チャンネルのシグナルが別のチャンネルに漏れ込むことがあり、その結果、検出される共局在が過大評価される場合があります。この現象は、スペクトルが類似した蛍光色素(例:GFP と YFP)で特に起こりやすいです。これは、本来は別の蛍光色素を励起するための光によって、他方の蛍光色素が弱く励起され、その結果生じた蛍光が発光フィルターを通過してしまうことにより生じます(例:緑色のオブジェクトが黄色チャンネルにも写りこむ)。この影響は、単一標識コントロールを用いて評価します。
共局在指標の不適切な解釈 ここで選択する指標の詳細は非常に重要です。指標ごとに、背景画素をどの程度含めるか、S/N比にどの程度影響を受けるかなどの点で大きく異なります。得られた測定値が意図した内容を正しく反映しているかは、専門家に相談するか、適切なコントロールを導入することで確認できます。